


 技術咨詢
技術咨詢
最新資訊
- 如何解決光伏并網點諧波問題07-23
- 光伏并網點諧波會引發哪些問題07-23
- 光伏并網點出現諧波怎么處理07-23
- 動態補償柜的應用范圍是什么07-23
- 無功功率補償柜的動態是如何實現的07-23
- 云中心是否適合做電力集控站07-21
- 云中心模式下,如何確保電網安全07-21
- 電力集控使用云中心會帶來哪些優勢07-21
- 電力集控使用云中心的安全性如何保障07-21
- 關于電力集控使用云中心,有什么解決方案07-21
contact us
聯系我們

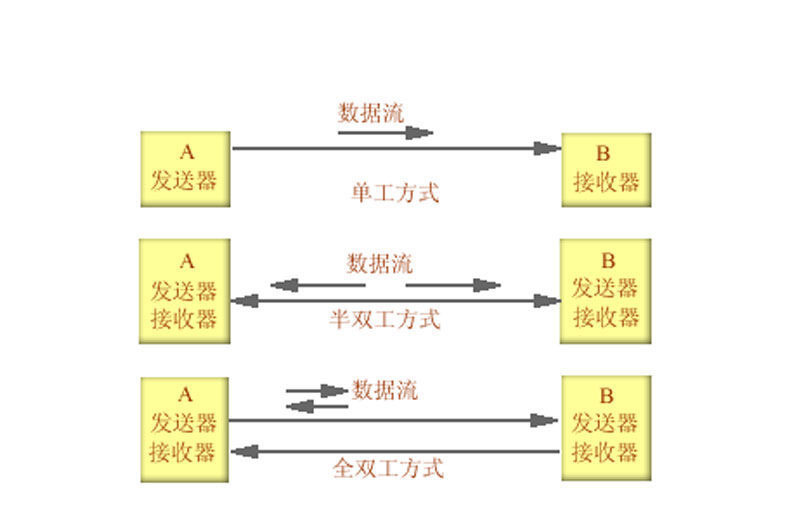
CAN口通信方式介紹
- 編輯 :
專注微機保護
時間 : 2025-06-23 09:56 瀏覽量 : 21
相關文章
- 如何解決光伏并網點諧波問題 07-23
- 光伏并網點諧波會引發哪些問題 07-23
- 光伏并網點出現諧波怎么處理 07-23
- 動態補償柜的應用范圍是什么 07-23
- 無功功率補償柜的動態是如何實現的 07-23
- 云中心是否適合做電力集控站 07-21
- 云中心模式下,如何確保電網安全 07-21
- 電力集控使用云中心會帶來哪些優勢 07-21
- 電力集控使用云中心的安全性如何保障 07-21
- 關于電力集控使用云中心,有什么解決方案 07-21